|

|
|
This page presents information about a 3-way loudspeaker that was designed using the Virtual Crossover to develop the passive crossovers for the system. This information is presented to give you an idea of the kind of development and testing that can be done with the Virtual Crossover.
The most important design goal in the development of this
loudspeaker was to optimize the early arrival sound.
The direct sound heard in the first few milliseconds
from a speaker is extremely important to its overall subjective
quality. The response of this speaker
is highly accurate in both amplitude and phase. Achieving this level of
accuracy requires careful attention to the time alignment
of the drivers and to the development of the crossover circuits.
Each channel of the speaker consists of two separate enclosures, a satellite
enclosure and a low-frequency enclosure. Each satellite enclosure contains
one tweeter (Vifa H26TG-35)
which is surrounded by two midrange drivers (Vifa P13WH)
in the vertical
direction; this arrangement minimizes frequency response variations.
Since the tweeter and
midranges are mounted on the same baffle, time alignment for these drivers
is obtained using an L-C delay line network in the tweeter crossover
circuit. An all-pass network is employed so that the tweeter response is
not attenuated in amplitude. Time alignment between the satellite and
low-frequency drivers (Meniscus W0838)
is achieved by physically offsetting the satellite enclosure
behind the low-frequency enclosure, which is one reason for separating
the drivers in different enclosures. Other reasons for this separation
are to isolate the drivers and to simplify the design requirements for
the low-frequency enclosure. Yet another reason is that by adjusting
the relative positions of the satellite and low-frequency enclosures,
the midrange level can be tuned.
There are many different ways to approach crossover design. The method
I used was to begin by looking at the individual driver responses,
while mounted in the actual speaker enclosures to be used. For the
satellite (midrange-tweeter) enclosure, the drivers were measured
approximately six feet from the enclosure, on axis with the tweeter.
For the woofer, since it is extremely difficult to obtain low-frequency
information this far away from the speaker unless you have an
anechoic chamber, the method of close-miking was used. I then incorporated
circuits in the crossovers to compensate for some of the non-ideal
characteristics observed for the drivers.
Next, components must be included that implement the basic function of
transitioning from one driver to the others; since I wanted to achieve
excellent pulse reproduction, I basically used first-order crossover
filters.
Passive crossovers are used so that the loudspeaker requires
only a single amplifier to drive it.
I used the Virtual Crossover in the initial development
and testing of the crossover circuits; this allowed me
to determine a close approximation to the final
crossover circuits without having to construct any
actual circuit prototypes. This procedure dramatically
reduces the number of required circuit prototypes.
In the final stage, circuit prototypes
were made and final adjustments were made, which were
necessary because the circuit models provided to the
Virtual Crossover were not perfect.
At this point
I want to make a comment about implementing these
circuits using the Virtual Crossover. First of all,
the Virtual Crossover can only do as good a job modeling
a real crossover as the model that you provide for it.
In my experience, inductors are the most problematic
circuit elements to model. Their series resistance
must be included, and it is not always sufficient simply
to measure their DC resistance, because the AC resistance
of inductors can be significantly greater than the DC
resistance; this problem gets worse as the frequency
goes up, so it is especially important for the tweeter
crossover circuit. If you have coupled inductors in
your circuit, the coupling coefficient must be determined,
which is sometimes a difficult task. And at higher audio
frequencies, parasitic capacitance between the windings
of an inductor may become important. Here I simply present
the nominal crossover circuits for the speaker system,
without getting into these issues of component modeling.
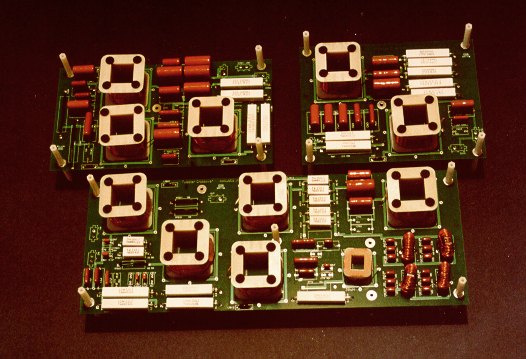
The following photo shows the
assembled crossover boards for one channel, before being mounted
in the satellite and low-frequency enclosures: